


近期,中国科学院合肥物质院智能所仿生智能团队提出了一种基于双向注意力的轻量车道线检测算法。相关研究成果已在土木与计算机交叉学科著名期刊Computer-Aided Civil and Infrastructure Engineering上发表。
在自动驾驶和智能交通系统中,车辆需要实时感知和理解道路环境,其中准确检测车道线非常重要。使用基于视觉分割的方法可以为自动驾驶车辆提供道路场景中车道线和其他目标的位置等信息,从而提供必要的环境感知,增强安全性。视觉注意力尽管可以提高网络的分割性能,然而卷积中的卷积核是一种局部算子,需要依赖网络的重复堆叠才能实现长距离信息的捕获;且堆叠的层数越多,网络参数量就越大,实时性就越低;层数越少,长距离信息捕获的能力就越弱,分割性能越低。而车道线的特点是线型且细长状的,利用长距离像素之间的依赖关系可检测出被遮挡的车道线。如何兼顾两者的平衡是一个很大的问题。
为进一步提高网络的实时性以及获取长距离信息间的高捕获能力,科研团队提出了基于双向分离注意力的车道线检测与分类网络(TSA-LNet)。首先,该方法基于语义分割的思想,对编码器–解码器模型进行重新设计,以生成参数较少的轻量级网络(LNet)。其次,为了使模型对挑战性环境具有鲁棒性,引入双向分离注意力(TSA)构建长距离像素之间的依赖关系。TSA可以集成到LNet中,以捕捉车道的局部纹理和全局背景信息,而不会增加处理时间。在多个公开数据集上的结果表明TSA-LNet实现了优秀的检测准确性和更快的速度。
张露博士为第一作者,孔斌研究员为通讯作者。本工作得到国家自然科学基金、安徽省自然科学基金等项目的支持。
文章链接:https://doi.org/10.1111/mice.13051
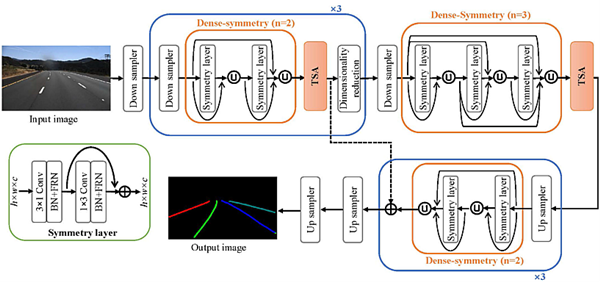
图1 基于双向注意力的轻量车道线检测网络架构图

