


10月27日至29日,由中国人工智能学会主办,同济大学与上海市松江区人民政府联合承办的第十六届中国智能机器人大会在上海举行。作为国内机器人领域的重要学术交流平台,此盛会汇聚了机器人领域的众多院士、专家、学者、研究生、政府及企业家等500多位代表参会。
中国科学院合肥物质院智能所王晓杰研究员课题组博士生陈皓枫向大会递交了题为“MM-CNN Empowers Dual-Model EIT Tactile Sensors”的英文论文,并报告了他们的研究成果。经过各分会场推荐和评审委员会评分,陈皓枫博士的论文从100多篇论文中脱颖而出,荣获优秀论文奖。
该研究关注大面积触觉感知系统的设计,探索复杂环境中人机交互的关键性技术。通过电阻抗成像(EIT)技术,成功实现了大面积三维表面的高效触觉感知。另外,研究团队将物理模型与卷积神经网络相融合,提出一种多模式卷积神经网络(MM-CNN)重构算法,开创性地解决了EIT技术在接触力和形状识别中的精度限制,实现了同时高效识别接触力和接触形状。在视频演示中,该技术可以在机械臂防碰撞方面发挥重要作用,有效保障了机器人在狭窄空间中的安全作业。此外,通过模拟触觉强度对情绪的影响,可以在人机交互中创造更加真实、亲近的体验。最后,通过在手臂上实现穿戴和触摸检测,可以实现更为灵活、直观的人机交互方式。这一综合方法为机器人在复杂环境中与人类安全合作提供了新的方法和应用前景。

图一 优秀论文颁奖、优秀论文证书
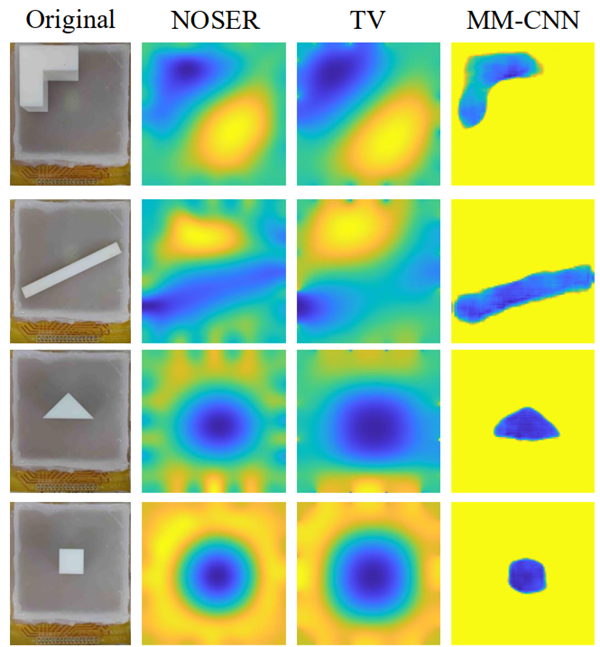
图二 所提MM-CNN方法的形状检测效果
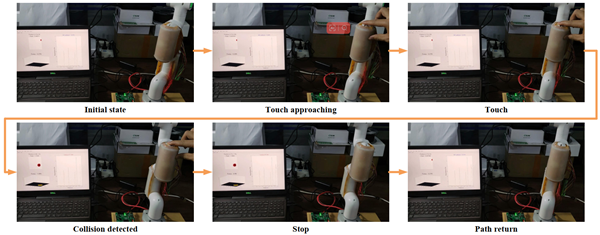
图三 机械臂防碰撞交互实验演示
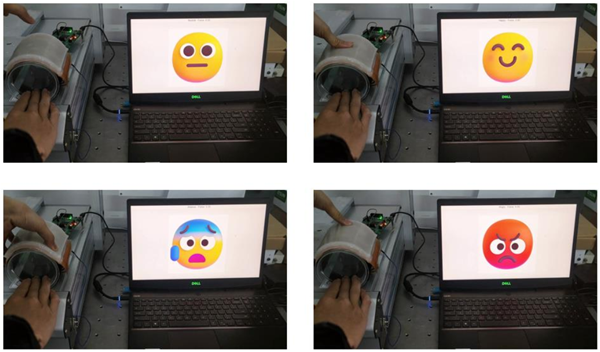
图四 模拟人机交互中触觉感知与情绪反馈
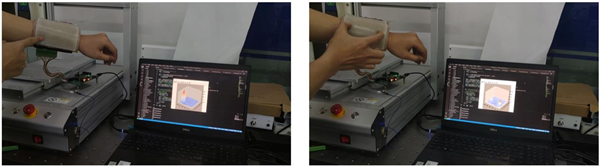
图五 在手臂上进行穿戴和触摸检测的演示

